Abandoned Object Detection
This example shows how to track objects at a train station and to determine which ones remain stationary. Abandoned objects in public areas concern authorities since they might pose a security risk. Algorithms, such as the one used in this example, can be used to assist security officers monitoring live surveillance video by directing their attention to a potential area of interest.
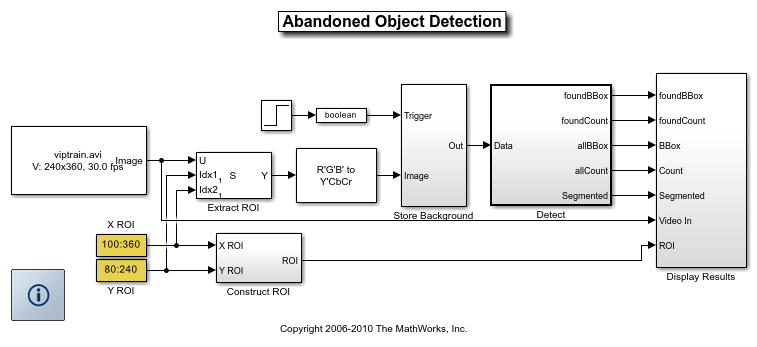
This example illustrates how to use the Blob Analysis and MATLAB® Function blocks to design a custom tracking algorithm. The example implements this algorithm using the following steps: 1) Eliminate video areas that are unlikely to contain abandoned objects by extracting a region of interest (ROI). 2) Perform video segmentation using background subtraction. 3) Calculate object statistics using the Blob Analysis block. 4) Track objects based on their area and centroid statistics. 5) Visualize the results.
Watch the Abandoned Object Detection example.
Example Model
The following figure shows the Abandoned Object Detection example model.
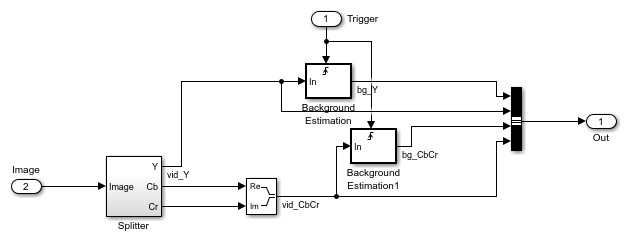
Store Background Subsystem
This example uses the first frame of the video as the background. To improve accuracy, the example uses both intensity and color information for the background subtraction operation. During this operation, Cb and Cr color channels are stored in a complex array.
If you are designing a professional surveillance system, you should implement a more sophisticated segmentation algorithm.
Detect Subsystem
The Detect subsystem contains the main algorithm. Inside this subsystem, the Luminance Segmentation and Color Segmentation subsystems perform background subtraction using the intensity and color data. The example combines these two segmentation results using a binary OR operator. The Blob Analysis block computes statistics of the objects present in the scene.
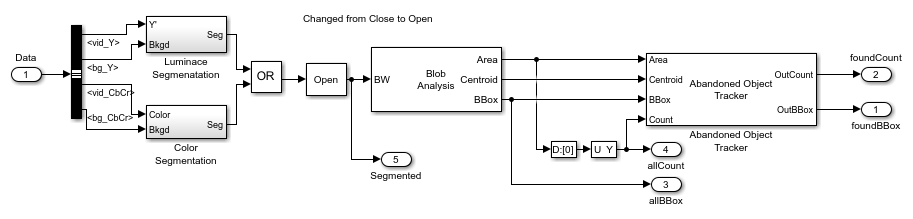
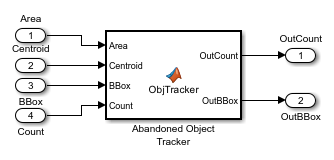
Abandoned Object Tracker subsystem, shown below, uses the object statistics to determine which objects are stationary. To view the contents of this subsystem, right-click the subsystem and select Mask > Look Under Mask. To view the tracking algorithm details, double-click the Abandoned Object Tracker block. The MATLAB® code in this block is an example of how to implement your custom code to augment Computer Vision Toolbox™ functionality.
Abandoned Object Detection Results
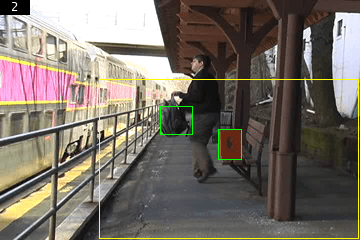
The All Objects window marks the region of interest (ROI) with a yellow box and all detected objects with green boxes.
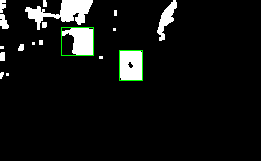
The Threshold window shows the result of the background subtraction in the ROI.
The Abandoned Objects window highlights the abandoned objects with a red box.

You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)